- Робот-змея научился взбираться по лестнице
- Ходящие (шагающие) роботы
- Ходящие (шагающие) роботы — Классификация роботов по конструкции — Роботы
- Двуногие (ходящий «как человек»)
- Четвероногие (квадрупеды)
- Шагающие роботы, Россия
- Восьминог, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград
- Кубань, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград
- Ортоног, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград
- Рысь (BPMBR400), Ковровский ВНИИ Сигнал, г. Ковров, Россия
- Тетработ, Крейф (ООО Крейф), Россия
- AnyWalker, Кубанский ГУ и МТИ
- AR-601, Андроидная техника (НПО «Андроидная техника»), Москва
- FEDOR, Андроидная техника (НПО «Андроидная техника»), Москва
- Каталог зарубежных ходящих роботов
- Alpha 2, UBTECH, Китай
- ASIMO, Honda, Япония
- Atlas, Boston Dynamics, США
- ATRIAS, Oregon State University, США
- BALLU, RoMeLa, США
- Cassie, Agility Robotics, США
- Charlie
- Cheetah 2, Boston Dynamics, США
- Da Gou (Mountainous Bionic Quadruped Robot), Norinco, Китай
- DURUS, Технологический институт Джорджии, США
- Ghost Minitaur, Ghost Robotics, США
- HyQ, Технологический институт в Генуе, Италия
- Kengoro, Tokio University, Япония
- LS3 BigDog (Робомул), Boston Dynamics, США
- miniSpot, BostonDynamics, США
- NAO, Aldebaran Robotics, Франция (Япония)
- R5, NASA/DARPA, США
- RoboSimian, NASA, США
- Spot, Boston Dynamics, США
- SpotMini, BostonDynamics, Япония
- WildCat, Boston Dynamics, Япония (США)
- Шагоход Google, Alphabet / Schaft, США
- название неизвестно, BostonDynamics, США
- Шагоход Пешеход номер 1, Китай
- Название неизвестно, Китай
- Новости
Робот-змея научился взбираться по лестнице
Человекоподобные роботы наподобие Atlas от Boston Dynamics умеют перепрыгивать через препятствия, а роботизированный пес SpotMini без проблем шагает по ступенькам. К сожалению, им пока неподвластны приставные лестницы, по которым нужно взбираться используя не только ноги, но и руки. Пока для роботов Boston Dynamics это кажется сложнейшей задачей, исследователи из Киотского университета и Университета электросвязи в Японии разработали механизм, способный на это. Правда, конструкция этого робота может показаться весьма необычной.

Инженеры отказались от конструкции с двумя или четырьмя конечностями и создали робота в виде змеи. Конструкция предельно проста — она почти полностью состоит из моторов, трубок и шарниров. Такая простота придает ей гибкость, позволяющую медленно и надежно скручиваться вокруг каждой ступени и подниматься наверх. На видео видно, что она отлично воссоздает движения настоящей змеи.
Считается, что роботу-змее найдется множество разных применений. Например, он способен ползать по трубам и искать места закупоривания, а также выполнять спасательные операции вроде поиска жертв при землетрясениях. В мае 2016 года подобный ему робот Eelume продемонстрировал свою эффективность в починке сооружений. Позднее, в феврале 2017 года, он научился работать в глубинах открытого моря.
Помимо гибкости, у змеевидной конструкции есть еще один плюс — невысокая стоимость. Во сколько обходится разработка одного робота-змеи — неизвестно, но с учетом минимального количества компонентов эта сумма явно меньше, чем стоимость роботов Boston Dynamics. К слову, старт продаж роботов-собак SpotMini намечен на 2019 год, но цена пока неизвестна.
Как вы считаете, какие еще преимущества есть у подобных механизмов? Свои варианты можете описать в комментариях или в нашем Telegram-чате.
Источник
Ходящие (шагающие) роботы
Ходящие (шагающие) роботы — Классификация роботов по конструкции — Роботы
Роботы, способные передвигаться с помощью ходьбы с поддержанием баланса. Ходьба, столь привычная для людей — это процесс, который оказалось сложно повторить на робо-платформах. Ходить способом, напоминающим тот, каким ходит человек, по-состоянию на 2015-2016 годы способны лишь отдельные роботы. Это привлекает к теме многих разработчиков.
И все же задача кажется решаемой, скорее всего она будет решена еще до наступления 2020 года.
В разделе ниже будем рассматривать в основном шагающих роботов гуманоидного и других типов. Роботов, использующих для ходьбы 4 конечности называют квадрупедами, ознакомиться с ними можно здесь.
Двуногие (ходящий «как человек»)
Четвероногие (квадрупеды)
Шагающие роботы, Россия
Восьминог, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград
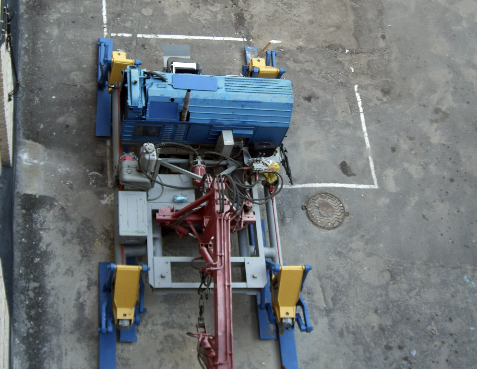
Совместно разрабатываемая шагающая машина, которая может служить платформой для создания роботов различного назначения — наземных и подводных.
2016.11.22 В Волгограде разрабатывают уникальных роботов-саперов / v1.ru
Кубань, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград
Совместно разрабатываемая шагающая машина, которая может служить платформой для создания роботов различного назначения — наземных и подводных.
2016.11.22 В Волгограде разрабатывают уникальных роботов-саперов / v1.ru
Ортоног, ВолгГТУ и ФНПЦ «Титан-Баррикады», Волгоград

Совместно разрабатываемая шагающая машина, которая может служить платформой для создания роботов различного назначения — наземных и подводных.
2016.11.22 В Волгограде разрабатывают уникальных роботов-саперов / v1.ru
Рысь (BPMBR400), Ковровский ВНИИ Сигнал, г. Ковров, Россия

Разработки в рамках ОКР Рысь-БП (Lynx-BP). На 2019 год назначены госиспытания.
Тетработ, Крейф (ООО Крейф), Россия
Оригинальный шагающий механизм. В разработке на 2017.09. Состоялись полевые испытания действующей модели.
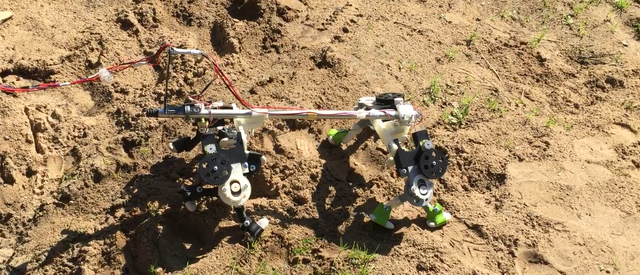
AnyWalker, Кубанский ГУ и МТИ
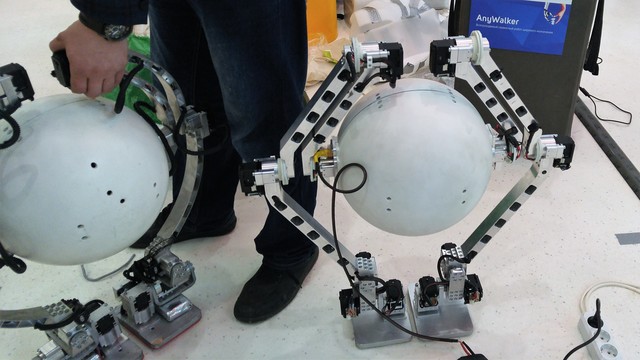
Может передвигаться по пересеченной местности на двух опорах, открывать двери, карабкаться по лестницам. Стабилизация за счет создания внутренних моментов силы. С участием специалистов компании Технодинамика. Автор проекта — Игорь Рядчиков. Пока что позиционируется, как образовательная платформа. В дальнейшем может быть использована в разработках персональных роботов. Передвижение выглядит очень медленным.
AR-601, Андроидная техника (НПО «Андроидная техника»), Москва

AR-601 (или AR-600E), 2017.01
FEDOR, Андроидная техника (НПО «Андроидная техника»), Москва
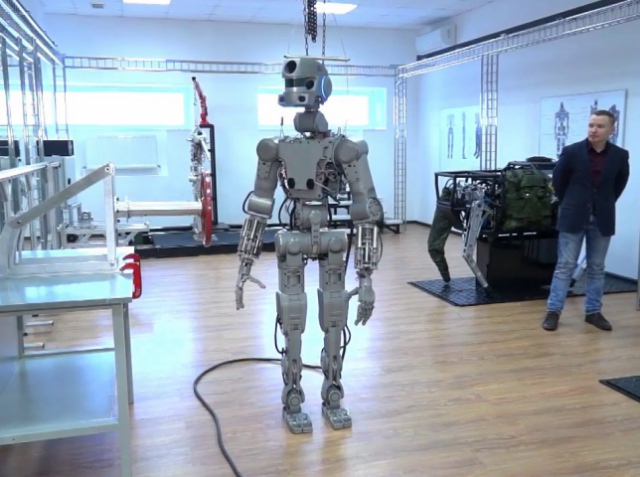
Final Experimental Demonstration Object Research — Финальный экспериментальный демонстрационный объект исследований. Разработка антропомофного робота в рамках проекта «Спасатель». Иногда также называется Аватар, поскольку имеет режим телеуправления с помощью «костюма», захватывающего движения оператора и формирующего соответствующий поток управляющих команд для робота. Кроме того, робот имеет элементы автономности — может самостоятельно совершить толчок, прыжок, подниматься после падения. Автономность ограничена рядом других «сценариев». Процедура самообучения демо-модели не предусмотрена.
Каталог зарубежных ходящих роботов
Alpha 2, UBTECH, Китай
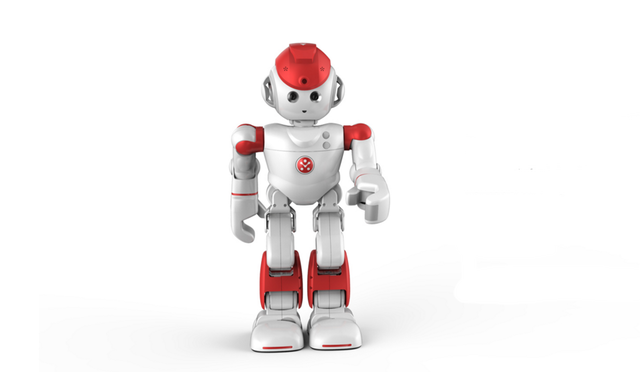
На 2015.11 в разработке, открыт прием заказов в рамках краудфандинговой программы по сбору средств.
ASIMO, Honda, Япония
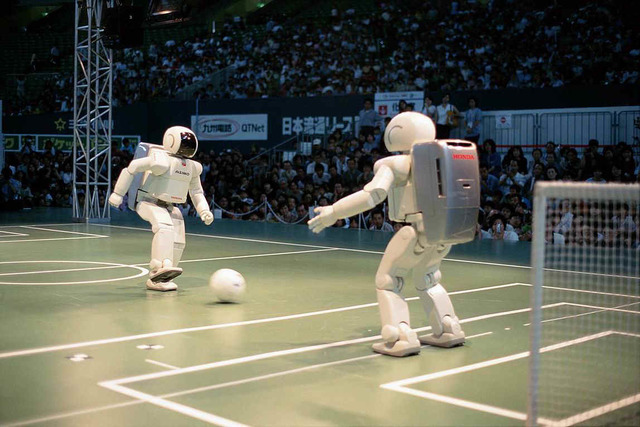
ASIMO (Advanced Step in Innovative Mobility). Робот андроидного типа, способный ходить и бегать. На 2016.03 замечательный прототип так и не превратился в коммерчески доступное изделие. Представлен в 2000 году. Рост 1.3 м. Вышло 4 версии на июнь 2017 года. Могут бегать по неровным поверхностям, не теряя равновесия. Практической пользы пока что не имеет. Цена — высокая.
Atlas, Boston Dynamics, США
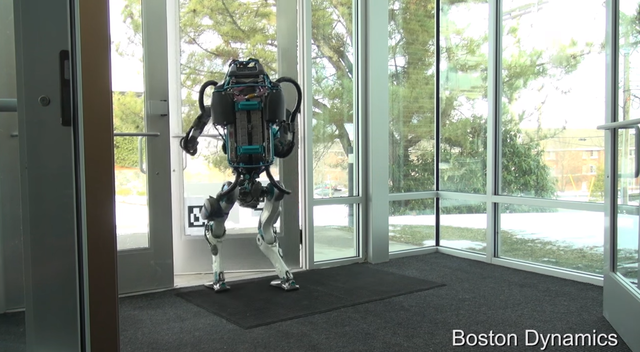
Лучший ходящий робот на 2016.02 в мире
ATRIAS, Oregon State University, США

На 2015.05 в разработке. Платформа для отработки механизма двуногого (бипедального) хождения.
BALLU, RoMeLa, США

2016.11 Оригинальный ходящий робот — воздушный шар с двумя ногами. Электроника и аккумулятор расположены в стопах робота. Управление — внешнее. Робот способен ходить в условиях помещения или в безветренную погоду, в том числе, преодолевая препятствия типа ступеней.
Cassie, Agility Robotics, США

Робот Cassie. Источник фото: Oregon State Univercity
Charlie

Робот-шимпанзе для работы в космосе. Скорее четверорукий, чем четвероногий, как и положено обезъяне. Наверное все же тоже «квадрупед».
Cheetah 2, Boston Dynamics, США
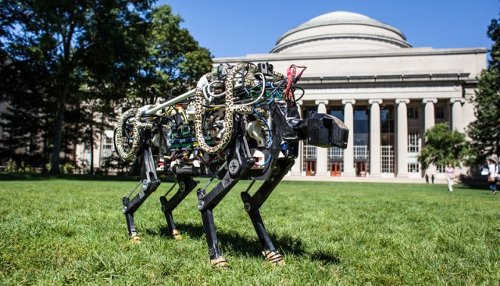
Робот-гепард. В мае 2015 года сообщается, что эта разработка MIT для DARPA научилась автономному бегу с препятствиями, впервые для четырехногих роботов. Видео .
Da Gou (Mountainous Bionic Quadruped Robot), Norinco, Китай
На испытаниях в Китае в октябре 2016 года можно было видеть два типа квадрупедов «бионического» типа, схожих с изделиями Boston Dynamics.
Один из них вроде бы знаком — он очень похож на Da Gou

ранее китайцы показывали «робота-собаку».
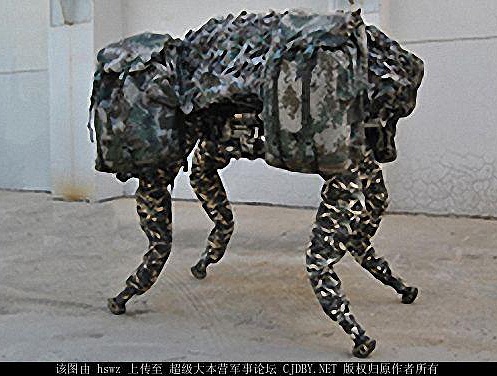
собака-робот для транспортировки грузов в горной местности
2015. Вес 130 кг, грузы весом до 30 кг, скорость до 6 км/ч, уклоны до 30 градусов. Две батареи. Продолжительность работы — не более 2 часов.
А вот второй шагоход — чуть больше:

DURUS, Технологический институт Джорджии, США

Ghost Minitaur, Ghost Robotics, США

Робот The Ghost Minitaur умеет перемещаться на четырех “ногах”, бегать, прыгать, карабкаться по ступеням и даже заборам. Интересна, в частности, цена новинки — всего $1500. Подробнее по ссылке.
HyQ, Технологический институт в Генуе, Италия

HyQ — Hydraulic Quadruped. Робот способен ходить по камням, двигаться рысью, карабкаться по ступеням, перемещаться задним ходом и вставать на ноги после падения. Создателям HyQ потребуется доработать свое детище, прежде чем оно сможет принять активное участие в поисково-спасательных мероприятиях.
Kengoro, Tokio University, Япония
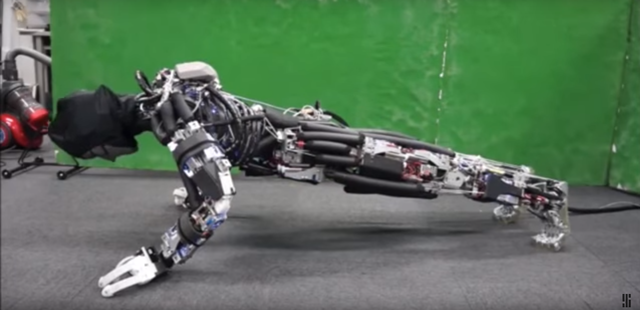
Двуногий робот, способный ходить и даже отжиматься от пола. Более 100 электродвигателей и других актуаторов. Основная особенность — робот может «потеть», что позволяет ему бороться с перегревом, связанным с высокой плотностью электромоторов и актуаторов. Для этого роботу требуется пополнять запас воды.
LS3 BigDog (Робомул), Boston Dynamics, США

Квадрупед (робот «Большая собака» или робот-мул), робот-вьючное животное, первоначально спроектированный в интересах военных, которые рассматривали его в качестве прототипа роботизированного вьючного животного для военных. В конце 2015 года был признан негодным для использования в армии из-за чересчур шумного дизельного двигателя.
miniSpot, BostonDynamics, США
NAO, Aldebaran Robotics, Франция (Япония)

NAO H25 Next Gen. Домашний антропоморфный робот высотой 58 см. Компаньон, помощник или исследовательская платформа (STEM). С 2012 года.
R5, NASA/DARPA, США

Фото: NASA, источник: nasa.gov . R5 демонстрирует улучшенный баланс
Робот для использования в космосе, на Луне, на Марсе. С двумя ногами и возможностью хождения. На 2015.11 в разработке.
RoboSimian, NASA, США

с изрядной натяжкой можно было считать этого робота «роботом-пауком»
Разработка команды Robosimian (NASA Jet Propulsion Laboratory) в рамках создания прототипа робота для использования в условиях космоса или на других планетах. По другой версии — на основе данной разработки планировалось создать «робота-спасателя». Четыре «ноги» с большим числом степеней свободы должны были обеспечить роботу возможность передвижения по лестницам, преодолевая ступени. Кроме того, робот должен был научиться разгребать завалы. Погиб в 2016 году из-за самовоспламенения аккумуляторов.
Spot, Boston Dynamics, США

2015.09.24 В США проведены испытания действуюшего прототипа «робота-собаки» Spot компании Boston Dynamics. Во время тестов на базе морпехов Quantico, Spot заходил в здания, подлежащие проверке, искал в них противника. Благодаря роботу, управлявший им оператор мог «заглянуть за угол». Робота Spot впервые показали в феврале 2015 года. Масса робота — 72,6 кг. Приводы — гидралические, питание от встроенного дизель-генератора. Управление роботом идет по радиоканалу, дальность действия — около 500 метров / robotrends.ru
SpotMini, BostonDynamics, Япония

2017.11.14 13 ноября 2017 года Boston Dynamics опубликовали видео с новой, более гибкой версией квадрупеда SpotMini. Не так давно компания сменила владельца — материнская компания Google — Alphabet — продала BD японскому гиганту SoftBank. ТТХ робота еще не разглашались, но выглядит он эффектно.
WildCat, Boston Dynamics, Япония (США)
Робот «дикий кот».
Робот с гидравлическим приводом от двигателя внутреннего сгорания. Способен бежать быстрее, чем средний человек. Уступает в скорости роботу-гепарду Cheetah, также разработке Boston Dynamics.
Шагоход Google, Alphabet / Schaft, США

2016.04.13 Alphabet’s Other Robotics Company . Больше подробностей о безымянном ходячем роботе японской дочки Alphabet. И о самой компании Schaft.
2016.04.09 Шагоход Google — странный ходячий робот. Двуногий прототип робота, способного передвигаться вне помещений не только по дорогам.
название неизвестно, BostonDynamics, США

Полезная нагрузка до 340 фунтов.
Шагоход Пешеход номер 1, Китай

Название неизвестно, Китай

показан в октябре 2016 года на конкурсе в Китае.
Новости
2017.11.14 13 ноября 2017 года Boston Dynamics опубликовали видео с новой, более гибкой версией квадрупеда SpotMini. Не так давно компания сменила владельца — материнская компания Google — Alphabet — продала BD японскому гиганту SoftBank. ТТХ робота еще не разглашались, но выглядит он эффектно.
2016.11.22 В Волгограде разрабатывают уникальных роботов-саперов / v1.ru
2016.04.13 Alphabet’s Other Robotics Company . Больше подробностей о безымянном ходячем роботе японской дочки Alphabet. И о самой компании Schaft.
2016.04.09 Шагоход Google — странный ходячий робот. Двуногий прототип робота, способного передвигаться вне помещений не только по дорогам.
2015.05.01 Исследователи из Oregon State University, США впервые провели тест своей разработки, двуногого ходящего робота ATRIAS, в услових вне лаборатории, в парке.
Источник