- Ступеньки больше не станут препятствием для роботов-пылесосов Roomba
- Возникновение идеи Roomba
- Немного о Roomba
- «Слепой» робот Кэсси научился ходить по лестнице (2 видео)
- Посмотрите, как новый робот пользуется лестницей без помощи человека
- ARTI – робот-пылесос, умеющий ходить по ступенькам
- «Слепой» Cheetah 3 робот может подниматься по лестнице, заваленной препятствиями
- Алгоритм принятия решений
- Планы на будущее
Ступеньки больше не станут препятствием для роботов-пылесосов Roomba

Если ваш напряженный образ жизни оставляет мало времени для работы по дому, роботы пылесосы могут помочь с этим. Хотя модели могут использовать некоторые довольно продвинутые технологии для автономного решения проблем с грязью в жилом пространстве, они в значительной степени ограничены.
Если вы хотите, чтобы ваш робот-пылесос убирался наверху, вам придется его туда поднять, заранее отключив. Петр Сриполь не очень доволен этой ситуацией, поэтому создал Roomba – летающего робота-пылесоса.
Возникновение идеи Roomba
Сриполь и его друг Уильям Осман начали проект летающего робота, взяв за основу дешевую модель, купленную в Интернете, и просто добавили три маленьких ротора, прикрепленных болтами непосредственно к корпусу устройства.
Роторы управляются беспроводным способом с помощью RC-передатчика, а шарнирные рули используются для того, чтобы ваш робот не вращался во время полета, и, во время первых летных испытаний, к устройству была прикреплена батарея.
Немного о Roomba
И уже скоро эта дешевая модель превратилась в Roomba робота-пылесоса, способного убираться на лестницах и миновать их при попытках очистить второй этаж дома от мусора. Но взлет и посадка могут стать проблемой во время уборки, поскольку роторы просто разгоняют всю грязь, прежде чем устройство приступит к работе.
Он немного более практичен, чем ваш обычный роботизированный пылесос, но при этом гораздо шумнее. Эта интересная технология продемонстрирована в видео ниже.
Источник
«Слепой» робот Кэсси научился ходить по лестнице (2 видео)

Научить ходить двуногих роботов является достаточно непростой задачей, требующей дорогостоящего оборудования и сложных алгоритмов. Хрупкое оптическое оборудование может быть повреждено при падении, а расчеты не всегда смогут учитывать особенности рельефа.
Разработчики из компании Agility Robotics (штат Орегон) нашли оригинальный способ решения трудной задачи. С помощью машинного обучения и тренировки на виртуальных тренажерах у двуногого робота Кэсси вырабатывалась «мышечная память», аналогичная проприоцепции у человека, способного ощущать относительное положение частей собственного тела в пространстве.
Обучение двуногих роботов эффективному хождению по ступенькам необходимо компании Agility Robotics для реализации проекта по разработке механических устройств, доставляющих посылки к порогу жилища заказчика. В настоящее время, передвигаясь по ступенькам, роботы используют разнообразные датчики, эффективность которых зависит от многих условий. В частности передвижение в темное время может быть затруднительным, что не позволит использовать механизмы круглые сутки.
Экспериментаторы из Agility Robotics вместе с учеными из Университета штата Орегон приняли решение использовать полностью «слепого», лишенного машинного зрения робота. Тестовая модель под именем Кэсси прошла предварительное обучение на виртуальных тренажерах, а затем и была протестирована на реальной лестнице.
«Слепой» Кэсси не мог использовать данные с датчиков и применял свой предыдущий проприоцепционный опыт, подобный мышечной памяти у человека. На демонстрационном ролике, опубликованном на Dynamic Robotics Laboratory, показано испытание с десятью подъемам и спусками робота Кэсси по лестнице. В результате в 8 из 10 случаев машина безошибочно поднялась и во всех случаях успешно спустилась по незнакомой для нее ранее лестнице.
Источник
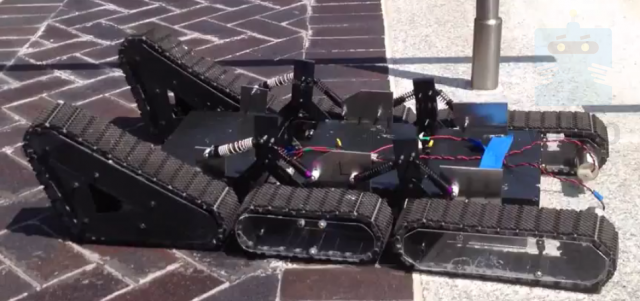
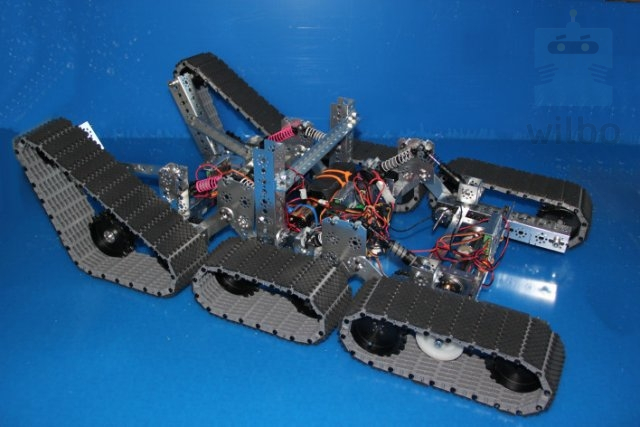
Посмотрите, как новый робот пользуется лестницей без помощи человека
Издание IEEE Spectrum сообщает, что команда японских ученых научила робота-собаку автономно взбираться по лестнице. В будущем исследователи планируют обучить устройство работать во время чрезвычайных ситуаций.
Команда Токийского Университета и Университета Окаяма представила четырехногого робота на Международной конференции по интеллектуальным роботам и системам IEEE/RSJ.
У устройства четыре ноги, каждая из которых имеет пять степеней свободы. Именно эти конечности робот может использовать для захвата ступенек лестницы. Он также оснащен несколькими датчиками, которые работают с нейронной сетью и направляют устройство вверх по лестнице.
Команде еще только предстоит опубликовать научную статью с описанием устройства своего робота, но видео о машине показалось исследователям достаточным доказательством его эффективности. Японские ученые добавили, что следующая версия собаки будет помогать людям в случае стихийных бедствий, взбираясь на наклонные и вертикальные поверхности.
Ранее группа российских и немецких нейрофизиологов представила искусственный интеллект, который может анализировать сигналы электрической активности мозга и находить в его работе следы различных нарушений. Разработка искусственного интеллекта под руководством Александра Храмова из Лаборатории нейронауки и когнитивных технологий Университета Иннополис позволила нейросети искать отклонения от нормы по данным электроэнцефалограммы мозга.
Источник
ARTI – робот-пылесос, умеющий ходить по ступенькам
Для роботов-пылесосов преодоление порогов или движение по лестнице – это основное препятствие, не позволяющее потребителю получить максимально нацеленную пользу от их работы. Поэтому, разработчики все больше централизируют свое внимание на проблемах подъема и спуска домашних помощников. Проект Ground Dron был в разработке предыдущие несколько лет, а сегодня следствием этого проекта показан ARTI, новый бот с открытым исходным кодом.
Снаружи ARTI может напомнить детскую игрушку, управляемую дистанционно. Данная модель очень прочная, в ее основе находится надежный корпус, выдерживающий падение и удары. Основной мыслью разработчиков было представить на рынок универсальную основу роботов, которую потребитель сможет усовершенствовать по своему усмотрению. Сегодня уже есть возможность купить АBS версию за 339$ или премиум за 509$. В обе модификации входят специально разработанные детали Ground Dron. В связи с тем, что ARTI имеет открытый исходный код, практически каждый изобретатель сможет построить свой собственный уникальный ARTI.
Основные коробки для размещения датчиков и электроники внутри ARTI разработчики не заполнили полностью, оставив каждому владельцу робота место для развития его фантазии. Таким образом, данная модель представлена в роли базового материала для того, чтобы оценить, что люди смогут сделать с ним, когда применят свой интеллект и разные детали. Окончательный вариант пылесоса ARTI будет представлен потребителям и появится на рынке электроники в конце года.

Роботизация с Wilbo.ru
WILBO — интернет магазин, специализирующийся на продаже роботов, В том числе бытовых роботов, 3d принтеров и различных гаджетов.
У нас одна из самых широких среди аналогичных магазинов в России линеек товаров, насчитывающая на текущий момент более 500 наименований различных товаров. Продажа роботов осуществляется ежедневно. Вы можете купить робота с доставкой по Москве и всей России.
Где купить роботов?
Можно робота купить в Интернет или оффлайн магазине. Недорогие роботы продаются со склада. Для заказа очень дорогих и исключительных моделей требуется оформление предварительного заказа и внесения предоплаты. Эксклюзивные заказы поставляются из-за рубежа в течение 2-4 недель.
Подводное исследование: подводные роботы радикально изменили то, как мы видим мир с дна океана. Подводные роботы могут погружаться дольше и глубже, чем любой человек, и они обеспечивают пристальный взгляд на морскую жизнь. Эти удивительные машины оснащены датчиками, камерами высокой четкости, колесами и другими технологиями, чтобы помочь ученым, когда они исследуют доки, океанские полы, плотины, сундуки и другие поверхности. Наиболее распространенными подводными роботами, используемыми сегодня, являются автомобили с дистанционным управлением (ROV), которые контролируются людьми, сидящими в командном центре. ROV подключаются кабелем к судам и являются лучшим инструментом для сбора данных и изображений жизни под водой.
Очистка воздуховодов: Очистка воздуховодов выполняется лучше всего роботом, который может действительно вписаться в эти опасные и узкие пространства. Роботы обеспечивают более эффективную и эффективную очистку, чем ручные щетки. Кроме того, для промышленных и институциональных рынков безопаснее купить роботов, поскольку рабочие не подвергаются воздействию вредных химических веществ или ферментов, которые поступают от пылевых клещей. Роботы для очистки каналов используются в больницах и правительственных зданиях, которые могут иметь опасную или загрязненную среду, а также посольства и тюрьмы для более короткой и более безопасной очистки. Использование роботов для очистки каналов обеспечивает более быструю, безопасную, дешевую и эффективную очистку каналов без необходимости в человеке.
Борьба с преступностью: полицейские роботы помогают бороться с преступностью, не рискуя жизнью офицеров полиции. Сотрудники правоохранительных органов используют множество высокотехнологичных и дистанционно управляемых роботов, оснащенных передними и задними камерами, инфракрасным освещением и динамиком для поиска преступников и нахождения их местонахождения без угрозы для полицейского. Современные инструменты, такие как робот Robotex, являются водонепроницаемыми, могут подниматься по лестнице и переворачиваться и вращать камеру на 360 градусов, чтобы помочь поймать преступников. Другое оборудование, такое как Andros F6-A, используется полицейскими органами во время освобождения заложников. Можно такого робота купить. Это тяжелая машина способна стрелять из пушки или оружия, чтобы задержать преступника и защитить тех, кто находится в опасности.
Устранение разливов нефти: Как мы видели в разливе нефти BP в 2010 году, роботы играют важную роль в устранении разливов нефти. Подводные роботы используются для изучения площадки скважины и взаимодействия с проблемным оборудованием. Инженеры используют автомобили с дистанционным управлением (ROV), которые погружаются на большие глубины и остаются погруженными гораздо дольше, чем когда-либо мог любой человек. ROV — это подводные лодки с дистанционным управлением, которыми управляют люди, сидящие в командном центре. Эти высокотехнологичные роботы соединены кабелем с кораблями и используются для сбора видеоматериалов и информации от волоконно-оптических датчиков, которые помогают инженерам лучше понять проблему и вмешаться, когда это необходимо. ROV имеют гидравлические рычаги со сменными инструментами, такими как пилы и резаки, которые используются для выполнения задач вмешательства. Даже после того, как скважина закрыта, роботы используются для патрулирования участка скважины и обеспечения того, чтонефть больше не утекает.
Исследование опасных сред: роботы становятся все более важными для исследования опасных и опасных сред. На вопрос о том, где купить роботов, ответ однозначен — посети магазин и купи робота! Машины для исследования опасных сред способны входить в действующий вулкан для сбора данных или в горящее здание для поиска жертв. Роботы, такие как Скаут-Throwable Robot, используются правоохранительными органами и пожарными службами, чтобы помочь найти информацию о людях, застрявших внутри здания, и даже иметь возможность обнаруживать гранаты или взрывчатые вещества в этом районе.
Коммерческое сельское хозяйство: земледелие было открыто человеком с начала времён, но на протяжении многих лет роботы также были внедрены в мир коммерческого сельского хозяйства. Как и на производственных рабочих местах, на поле роботы имеют возможность работать быстрее, дольше и эффективнее, чем люди в сельском хозяйстве. Роботы избавляют человеческий фактор от этой трудоемкой и нудной работы. Их можно научить перемещаться по сельскохозяйственным угодьям, обрабатывать и собирать урожай самостоятельно. Роботы могут также использоваться для нужд садоводства, таких как обрезка, прополка, распыление пестицидов и мониторинг роста растений.
Источник
«Слепой» Cheetah 3 робот может подниматься по лестнице, заваленной препятствиями
Теперь робот Cheetah(Гепард) 3 MIT может прыгать и скакать по пересеченной местности, подниматься по лестнице, заваленной мусором, и быстро восстанавливать равновесие.
90-фунтовый механический зверь — размером с большого лабрадора — намеренно предназначен для всего этого, не полагаясь на камеры или любые внешние датчики окружающей среды. Вместо этого он проворно «чувствует» свой путь через свое окружение таким образом, что инженеры описывают как «слепое передвижение», так же, как пробиваться через черную комнату.
«Существует много неожиданных действий, с которыми робот должен справиться, не слишком полагаясь на видение», — говорит дизайнер робота Sangbae Kim, адъюнкт-профессор машиностроения в Массачусетском технологическом институте. «Видение может быть шумным, слегка неточным, а иногда и недоступным, и если вы слишком полагаетесь на видение, ваш робот должен быть очень точным и в конечном итоге будет медленным. Поэтому мы хотим, чтобы робот больше полагался на тактильную информацию. Таким образом, он может справляться с неожиданными препятствиями и при этом двигаться быстро».
В октябре на Международной конференции по интеллектуальным роботам в Мадриде исследователи представят возможности робота без зрения. Помимо слепого передвижения, команда продемонстрирует улучшенное оборудование робота, в том числе расширенный диапазон движения по сравнению с его предшественником Cheetah 2, который позволяет роботу растягиваться назад и вперед и крутиться из стороны в сторону, подобно тому, что на видео до прыжка.
Kim предполагает, что в течение ближайших нескольких лет робот выполнит задачи, которые в противном случае были бы слишком опасными или недоступными для людей.
«Cheetah 3 предназначен для выполнения универсальных задач, таких как осмотр электростанций, который включает в себя различные условия местности, включая лестницы, бордюры и препятствия на земле», — говорит Kim. «Я думаю, что есть бесчисленные случаи, когда мы хотели посылать роботов для выполнения простых задач вместо людей. Опасную, грязную и трудную работу можно сделать гораздо безопаснее с помощью роботов с дистанционным управлением».
Алгоритм принятия решений
Cheetah 3 может вслепую пробираться вверх по лестницам и через неструктурированную местность и может быстро восстановить равновесие перед лицом неожиданных сил благодаря двум новым алгоритмам, разработанным командой Kim: алгоритму обнаружения контакта и алгоритму прогнозирования управления.
Алгоритм обнаружения контакта помогает роботу определить наилучшее время для того, чтобы текущая нога переключилась с качания в воздухе, на встать на землю.
«Когда речь заходит о переключении с воздуха на землю, переключение должно быть очень хорошим», — говорит Kim.
Алгоритм обнаружения контакта помогает роботу определить лучшее время для перехода ноги между колебаниями и шагом, постоянно вычисляя для каждой ноги три вероятности: вероятность контакта ноги с землей, вероятность создания силы после того, как нога попадает на землю и вероятность того, что нога будет в середине. Алгоритм вычисляет эти вероятности на основе данных гироскопов, акселерометров и положений суставов ног, которые фиксируют угол и высоту ноги относительно земли.
Если, например, робот неожиданно ступит на деревянный блок, его тело внезапно наклонится, сдвинув угол и высоту робота. Эти данные будут немедленно поданы на вычисление трех вероятностей для каждой ноги, которые алгоритм будет сочетать, чтобы оценить, должна ли каждая нога совершать точек вниз, или поднимать и отбрасывать, чтобы сохранить равновесие — все это время робот практически слеп.
«Если люди закрывают глаза и делают шаг, у нас есть ментальная модель для того, где может быть земля, и может подготовиться к ней. Но мы также полагаемся на ощущение прикосновения земли, — говорит Kim. «Мы делаем то же самое, комбинируя несколько источников информации, чтобы определить время перехода».
Исследователи протестировали алгоритм в экспериментах с бегом Cheetah 3 на лабораторной беговой дорожке и поднялись по лестнице. Обе поверхности были завалены случайными объектами, такими как деревянные блоки и рулоны ленты.
«Он не знает высоты каждого шага и не знает, что на лестнице есть препятствия, но он просто шагает, не теряя равновесия», — говорит Kim. «Без этого алгоритма робот был бы очень неустойчивым и легко упал».
Планы на будущее
Слепое передвижение робота также частично было вызвано алгоритмом прогнозом управления, который предсказывает, какое усилие необходимо применять для данной ноги, как только она совершит шаг.
«Алгоритм обнаружения контакта скажет вам:«Настало время применить силу к земле», — говорит Kim. «Но как только вы окажетесь на земле, теперь вам нужно рассчитать, какие силы применять, чтобы вы могли правильно двигать тело».
Алгоритм управления прогнозом модели рассчитывает мультипликативные положения тела и ног робота в полсекунды в будущем, если какая-либо сила применяется любой данной ногой при ее контакте с землей.
«Скажем, что кто-то пинает робота в бок”, — говорит Kim. “Когда нога уже на земле, алгоритм решает, какую я должен применить силу на ногу? Потому что у меня есть нежелательная скорость слева, поэтому я хочу применить силу в противоположном направлении, чтобы убить эту скорость. Если я применю 100 ньютонов в противоположном направлении, что произойдет через полсекунды?”
Алгоритм предназначен для выполнения этих вычислений для каждого этапа каждые 50 миллисекунд или 20 раз в секунду. В экспериментах исследователи прикладывали неожиданные силы, пиная и толкая робота, когда он бежал рысцой на беговой дорожке, и дергая его за поводок, когда он поднимался по лестнице с препятствиями. Они обнаружили, что алгоритм предсказания позволяет роботу быстро создавать встречные силы, чтобы восстановить равновесие и продолжать двигаться вперед, не наклоняясь слишком далеко в противоположном направлении.
“Именно благодаря этому упреждающему контролю можно применить правильные силы на земле в сочетании с этим алгоритмом контактного перехода, который делает каждый контакт очень быстрым и безопасным”, — говорит Kim.
Команда уже добавила камеры к роботу, чтобы дать ему визуальную обратную связь о своем окружении. Это поможет в отображении общей среды и даст роботу визуальную информацию о больших препятствиях, таких как двери и стены. Но на данный момент команда работает над дальнейшим улучшением слепого движения робота.
“Сначала нам нужен очень хороший контроллер без зрения», — говорит Kim. “И когда мы добавим зрение, даже если оно может дать вам неправильную информацию, нога должна быть в состоянии справиться с препятствием. Потому что если это то, что камера не видит? Что он будет делать? Вот где слепое передвижение может помочь. Мы не хотим слишком доверять нашему зрению.”
Это исследование было поддержано, в частности, Naver, Toyota Research Institute, Foxconn и военно-воздушным управлением научных исследований.
Источник